作者 : 瑞其科技 技術總監 林育正
關鍵技術: 路徑規劃、機構分析、romAI、Activate
【 為何用AI來進行的路徑規劃 ? 】
以往當我們在進行機械手臂的路徑規劃時,須利用「逆運動學」去推導或運用相關模擬軟體來完成,但此方法較難掌握機械手臂的晃動與摩擦等行為。
有鑒於此,本文利用AI技術去訓練機械手臂的運作狀態,獲得馬達角度與手臂夾頭位置的關係。
完成AI訓練模型後,只要輸入預規劃的路徑,就可獲取馬達的角度時間歷程。最終將馬達角度時間曲線輸入機械手臂中,就可讓機械手臂成功執行預期的路徑並取得精準結果。
【 方法步驟 】
筆者以一個具有5顆步進馬達的機器手臂為案例,AI路徑規劃的步驟如下:
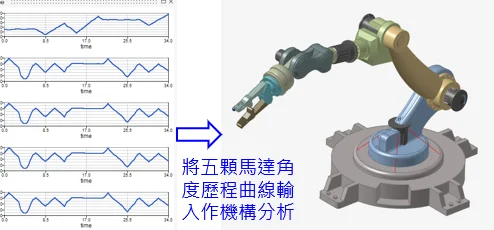
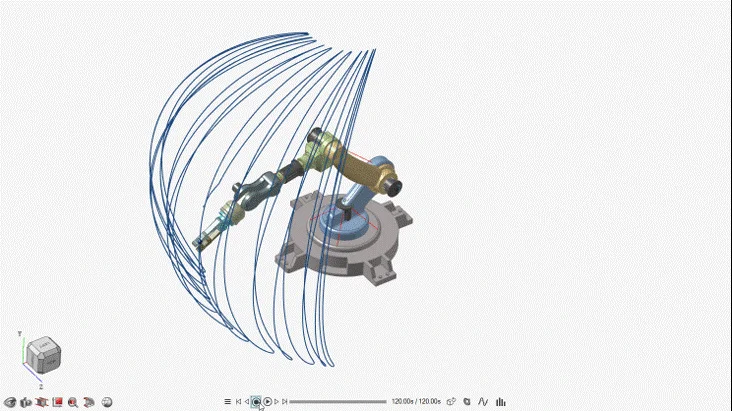
1. 機械手臂掃略:
將機器手臂進行120秒大範圍掃略,並紀錄整個軌跡中馬達角度與夾頭位置的時間歷程資訊,大約3600多筆資料。
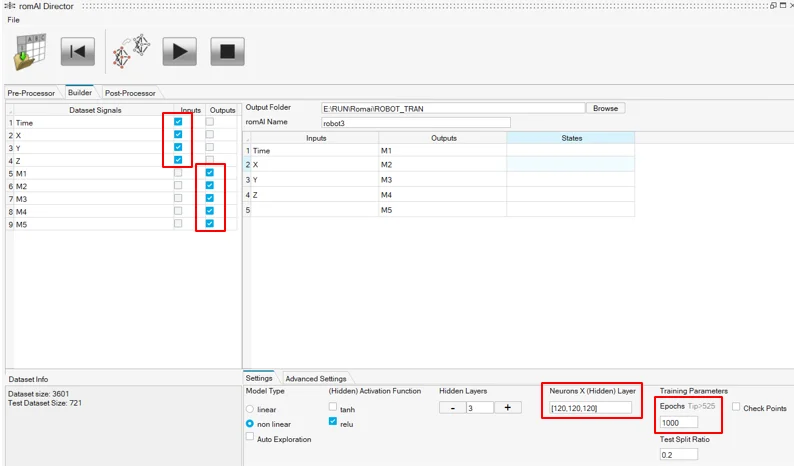
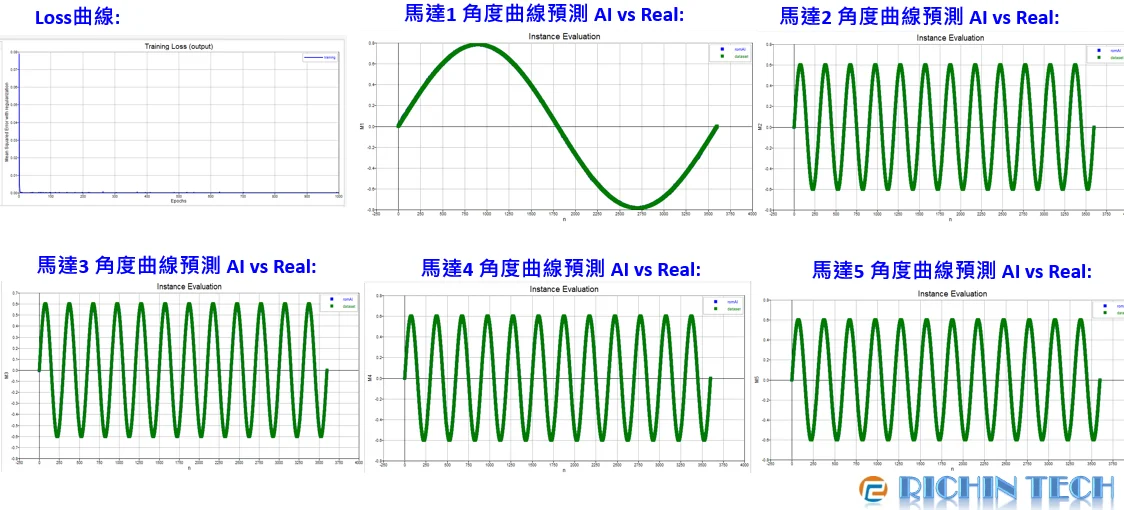
2. AI路徑訓練:
將上述的歷程資料輸入到Altair romAI中,Input為軌跡座標XYZ座標,對應Output則為5顆步進馬達的角度歷程,即可開始進行AI路徑模型的訓練。本案例romAI神經層數為3 [120,120,120]層,設置1000次跌代。
3. 精度驗證:
以訓練完成之AI模型進行路徑的精度驗證,確定該模型已可精準符合預期路徑
4. AI規劃路徑
將我們想讓機器手臂走的路徑資料,彙整成XYZ座標的形式。
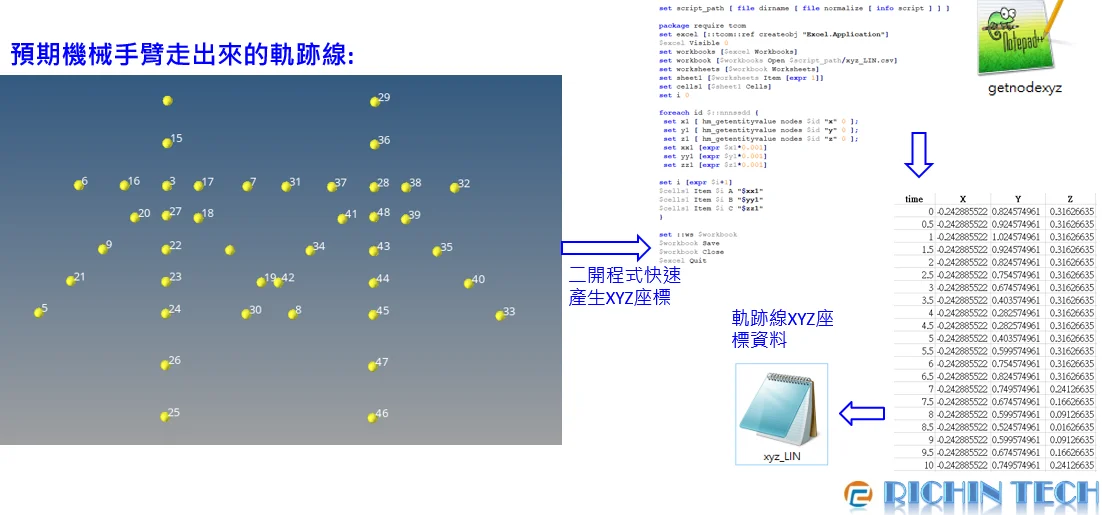
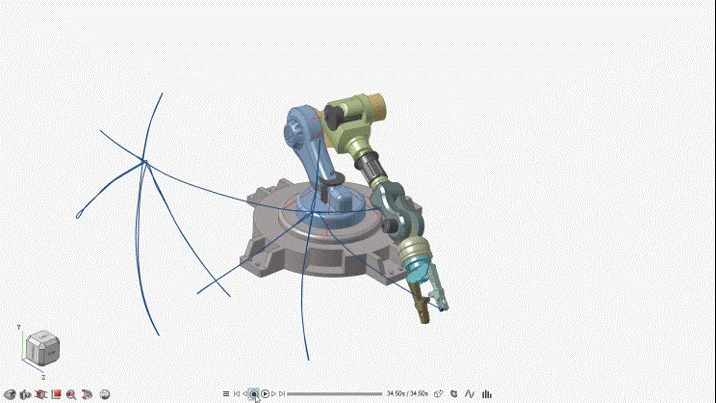
5. 完成路徑規劃
運用Activate將上述路徑資料輸入到訓練好的AI模型中,並藉由AI預測5顆步進馬達的轉角時間歷程,即可完成路徑規劃。由下圖動畫中,可看出AI規劃的路徑與我們期待的路徑相同。
【 技術亮點 】
- 相較於理論或模擬,以AI規劃路徑可避免複雜演算亦無需購買模擬逆運動學軟體
- AI路徑規劃可以考量實際可能發生的晃動與摩擦…等,此部分用理論或軟體模擬較難解決。
- 本文之技術可快速且精準實現機械手臂路徑規劃,本文亦應用於其他產品之路徑規劃。
【 延伸閱讀 】
運用AI實現機械手臂路徑規劃的技術